 Thermalling Gliders
Thermalling Gliders
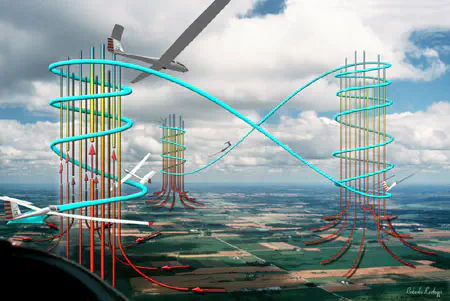
Soaring refers to the exploitation of free energy available in the environment. One such source of free energy is thermals (columns of rising hot air) which are routinely used by birds and glider pilots to increase their flight range. In this paper, we deal with a surveillance problem in which a group of gliders have to visit a set of interest points. The gliders can use thermals to visit more interest points by increasing their flight range. We present a path planning algorithm which makes sure that the gliders visit as many interest points as possible, while respecting the dynamic constraints of the gliders. We decompose the problem into two parts. The first part deals with planning the best path, for a single glider, while only considering a subset of interest points. The path is planned using Continuous Curvature turns and a graph search based approach. The second part deals with determining the best allocation of interest points for each glider. We also present optimality guarantees for our algorithm.
Muhammad Aneeq uz Zaman
PhD student
My research interests include Multi-agent Reinforcement Learning (MARL) using Mean-Field Game (MFG) paradigm.

